�����I�Ƀ��{�b�g���Љ�̒��ɑ������݂���悤�ɂȂ����Ƃ��ɁA���{�b�g���m�̒ʐM�͐l�ԂɌ����Ȃ���i
�i������ԊO���Ȃǁj�ɂ���čs����悤�ɂȂ�ƍl�����܂��B�������A���̂悤�ȃ��{�b�g�͏��Ȃ��Ƃ���������͉�����[�X�`���Ƃ�����
�l�Ԃ̗����\�ȕ��@�ɂ���ĒʐM���邱�Ƃ��K�v�Ȃ̂ł͂Ȃ����A�Ǝ������͍l���Ă��܂��B
���̂悤�ȍl������A�W�̗ւɊ�Â��R�~���j�P�[�V�������f�����l�Ă��܂����B���̃��f���ɂ����Ă�
�A���{�b�g���m�������̕��ȂǂɊւ����b���s�����ƂŁA���{�b�g�̊ώ@�҂͌�Ƀ��{�b�g�ƃR�~���j�P�[�V��������ۂɁA
���{�b�g�ƃR�~���j�P�[�V�������e�ՂɂȂ�ƂƂ��ɁA���{�b�g�������̕��Ƒ��ݍ�p�ł��邱�Ƃ𗝉����܂��B
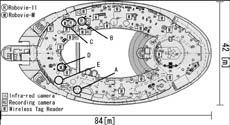
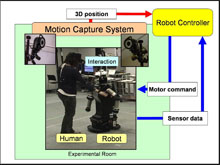
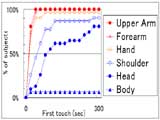
�������͎��ۂɂQ��̃��{�b�g�iRobovie�j��p���āA���{�b�g���m�̑Θb�V�X�e�����������܂����B�܂��A���{�b�g���m���Θb����������s���A
���{�b�g���m�������̕��Ƒ��ݍ�p���Ȃ���R�~���j�P�[�V�������邱�Ƃ̌��ʂ������܂����B
���\�_��
(PDF�t�@�C��)�F
|

�W�̗ւɊ�Â��R�~���j�P�[�V�������f��

���{�b�g�|���{�b�g�Θb

�l�|���{�b�g�Θb
|